今回は車載レーダー(システム)についてです。
この記事を読むことにより、皆様の自動車への関心が深まると幸いです。
昨今、導入の拡大が進んでいるADASですが、その内、レーダーシステムについて分かりやすくお話したいと思います。
ADAS(Advanced Driver-Assistance Systems;先進運転支援システム)とは、ドライバーの安全・快適を実現するために、運転を支援する機能の総称。自動車にセンサを搭載して周囲の情報を収集し、的確にドライバーに表示/警告する機能や、ドライバーに代わって自動車を制御する機能などがあります。
車載レーダーシステムは、周囲の状況を検知するためのレーダーを送受信するセンサ/ECUと処理/判断された情報を基に動作する車両システム(アクチュエータ・電動部品など)で構成されます。
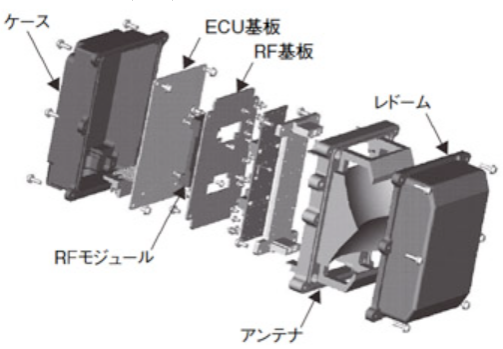
センサ/ECU(Electric Control Unit)は、レーダーを送受信部分(送受信MMIC(Monolithic Microwave Integrated Circuit)と送受信アンテナ)、検知した情報を基に判断するMCU(Micro Controller Unit)、車両システムとデータを通信する通信部分で構成されます。
ここで言うレーダーとは24GHz, 77GHzを代表とする波長の短い電波のことで、対象物に照射し、反射した電波を検出することで対象物までの位置(距離、方向)、速度を検知します。他のセンサ(超音波センサ、カメラ、LiDAR(Laser imaging Detection and Ranging)、GPSなど)と組み合わせることで、対象物を複合検知/認識ができ、周囲状況認識精度を高めることでより安全性を高めることができます。
少し古い絵ですが、ECUの基本構造は下記です。最近のECUは基板を1枚に集約するなどして、よりシンプルな構成になっています。(RF: Radio Frequency)
メリット、デメリット、課題は下記です。
< メリット >
カメラやレーザーレーダーとくらべると雨や霧などの影響を受けにくく、視界が悪い夜間(日中の逆光など)や悪天候に強い。
< デメリット >
微細な物体の形状や色彩の識別能力に欠ける。
< 課題 >
・分解能向上
77GHz帯(76〜77GHz)では帯域が500MHz〜1GHzに制限されているため、歩行者と自動車を分離検知できない。79GHz化、SiGe(低ノイズ・ハイパワー)からCMOSプロセス化が課題。
・設置位置の制約
ベストな検知性能を得るためには車両の特定の位置に設置しないといけない。このECU設置場所によって車両デザインが制限される。または、車両デザインを優先し、推奨設置位置から外れることで検知性能が損なわれる。
・電波干渉
車体や車輪などで干渉/反射した送信電波をECUが受信することにより、誤検知することがある。
・熱/振動
レーダーECUに限ったことではないが、小型化されたECUでは高性能MMIC、MCUなどの発熱の対策が課題。また、振動による電波信号への影響を補正する必要がある。
・悪天候の影響
カメラやレーザーレーダーとくらべると雨や霧などの影響を受けにくいが、分解能が向上される程、影響されやすくなるので、電波信号への影響を補正する必要がある。
・データー通信速度
車両システムと生データをやり取りする場合には、分解能が向上するほどデータ通信速度の向上が必要となる。
まとめ; 以上が現在の車載レーダーシステムの概要ですが、自動運転を目指した、より高いレベルでの周囲状況認識を実現するためには、各センサーの欠点を補うように、他のセンサ(超音波センサ、カメラ、LiDAR、GPSなど)と組み合わせる必要があります。
それでも、車載レーダーを用いた、死角モニタリング(BSM: Blind Spot Monitoring System)、車線変更アシスト(LCA: Lane Change Assist)、車両前方/後方確認機能(F/RCTA: Front/Rear Cross Traffic Alert)、自動緊急ブレーキ機能(AEB: Autonomous Emergency Braking)は安全運転の助けになっていると思います。その内、シートベルトの様に無いと不安になってしまう機能の一つになることでしょう。
以上、今回は車載レーダーについてでした。
この記事を読むことにより、皆様の自動車への関心が深まると幸いです。


コメント